『导读』全球科学家都在竞相开发自动驾驶汽车,但一些关键技术还有待完善。
目前,全球科学家都在竞相开发自动驾驶汽车,但一些关键技术还有待完善。一是定位,即车辆确定其位置和运动的能力。二是地图构建,即车辆对周围环境进行建模,将乘客安全运送到正确地点。
虽然GPS设备可以提供帮助,但并非所有情况下都可用并可靠。因此,许多专家正在研究即时定位与地图构建(SLAM)。据报道,特拉华大学机械工程、电子与计算机工程、计算机与信息科学助理教授Paul Huang的团队开发出新算法,能为车辆提供方向感。
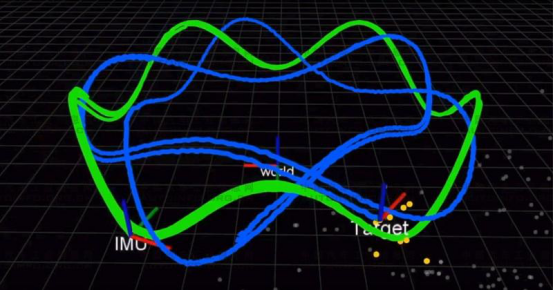
该团队利用3D激光雷达和惯性传感器,构建基于平面的3D地图。激光雷达与雷达类似,但使用的是光而不是无线电波。不同颜色的点代表不同平面,绿线代表真实轨迹,蓝线代表SLAM算法估算轨迹。
Huang使用视觉惯性导航系统,并结合摄像头和惯性传感器,其中陀螺仪确定方向,加速度计确定加速度。利用这些价格相对低廉、广泛应用的组件提供数据,测量并计算运动和定位。
该团队将他们的系统与笔记本电脑连接,并将其带到特拉华大学斯宾塞实验室(Spencer Laboratory),系统生成了足够多的数据,从而绘制大楼地图,同时追踪笔记本电脑运动。在自动驾驶汽车中,类似的传感器和摄像头将被安装在车辆机器人上。
Huang表示,“我们在GitHub上开源我们的代码,许多人在其系统中使用我们的代码。”在IJRR最近的一篇论文中,Huang和他的团队将SLAM问题重新表述为一个公式,由配备视觉和惯性传感器的机器人计算微小运动增量。
该算法的应用范围不仅限于自动驾驶汽车,还包括无人机、水下船只等。此外,还能用于开发移动设备增强现实和虚拟现实应用,例如已装配摄像头和惯性传感器的智能手机。Huang还表示,“这些传感器非常普遍,大多数移动设备、智能手机、甚至无人机和车辆都配备了这些传感器。我们试图利用现有的廉价传感器,提供定位与运动追踪解决方案。”

